Guidance, Navigation and Control System Design - Matlab / Simulink / FlightGear Tutorial
Video Not Working? Fix It Now
Model: https://github.com/Vinayak-D/GNCAirstrike
In this video you will learn how to build a complete guidance, navigation and control (GNC) system for a rocket / missile which is commanded to reach a specified target starting from a random initial position, by using LQR /LQG and Kalman filtering methods for control and estimation. You will learn
1) How to calculate azimuth, latitude, and longitudes
2) Calculate guidance commands, range, miss distance, elevation
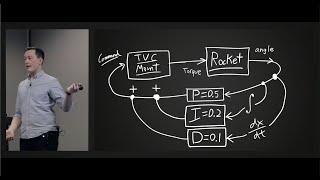
3) Design Linear Quadratic Regulator / Gaussian (LQR) for a 2d state space model
4) Build a 3-DOF Simulation with the Aerospace Blockset provided within Simulink
5) Perform simulation with FlightGear
TIMESTAMPS:
Theory: 00:50
Matlab Code: 06:00
Simulink Model (Control): 10:05
Simulink Model (Guidance, Navigation): 17:13
Guidance Command Calculation: 19:30
Simulation: 22:02
Conclusion: 25:10
RESOURCES:
Run Simulink in real time (Pacer): https://www.mathworks.com/matlabcentral/fileexchange/29107-real-time-pacer-for-simulink
Raytheon Paper: https://www.researchgate.net/profile/Curtis_Mracek2/publication/303256153_Missile_Longitudinal_Autopilots_Connections_Between_Optimal_Control_and_Classical_Topologies/links/573a1c2308ae9ace840dc5cc.pdf
MATLAB & Simulink Tutorials Playlist: https://www.youtube.com/playlist?list=PLlIRr36VdiM_Ja6tr91mk_ZQF6ATvVRXP]
Thanks for watching!
~~My Udemy Courses on Motion Planning / Navigation / Trajectory Planning:
https://www.udemy.com/course/autonomous-robots-nonholonomic-motion-planning-algorithms/
My Instagram: https://www.instagram.com/vinayak_desh/
My Website: https://www.vinayakd.com/
Comment