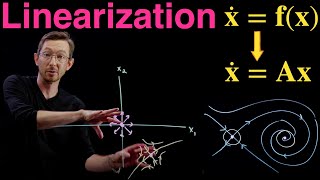
Linearizing Around a Fixed Point [Control Bootcamp]
Video Not Working? Fix It Now
This lecture describes how to obtain linear system of equations for a nonlinear system by linearizing about a fixed point. This is worked out for the simple pendulum "by-hand" and in Matlab.
Chapters available at: http://databookuw.com/databook.pdf
These lectures follow Chapter 8 from:
"Data-Driven Science and Engineering: Machine Learning, Dynamical Systems, and Control" by Brunton and Kutz
Amazon: https://www.amazon.com/Data-Driven-Science-Engineering-Learning-Dynamical/dp/1108422098
Book Website: http://databookuw.com
Brunton Website: eigensteve.com
This video was produced at the University of Washington
Comment

![Controllability [Control Bootcamp]](https://ytimg.googleusercontent.com/vi/u5Sv7YKAkt4/mqdefault.jpg)
![Inverted Pendulum on a Cart [Control Bootcamp]](https://ytimg.googleusercontent.com/vi/qjhAAQexzLg/mqdefault.jpg)
![Linear Systems [Control Bootcamp]](https://ytimg.googleusercontent.com/vi/nyqJJdhReiA/mqdefault.jpg)






![Degrees of Controllability and Gramians [Control Bootcamp]](https://ytimg.googleusercontent.com/vi/ZNHx62HbKNA/mqdefault.jpg)
![Stability and Eigenvalues [Control Bootcamp]](https://ytimg.googleusercontent.com/vi/h7nJ6ZL4Lf0/mqdefault.jpg)

