PID Loop Basics - NO MATH!
Video Not Working? Fix It Now
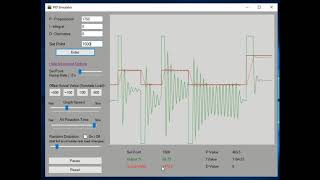
This video is intended to help guide field technicians responsible for tuning and programming PID loops to better understand what a PID Loop is, how it determines an output based on its input/control variable and its setpoint.
This video is NOT comprehensive of all applications, does NOT include all attributes of PID loops and is designed as a basics to help conceptualize how a PID loop is used and what each P, I and D is for within the PID Control Loop.
PID Loops can be intimidating, but let's simplify it!
---------------------------------------------------------------------------------------------------------------------
A couple definitions:
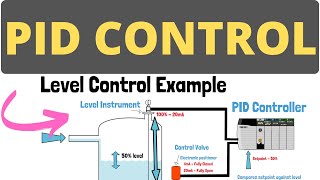
Input / Control Variable: This is the variable that we want to be controlling. If a PID Loop exists to control static air pressure, the input would be the static pressure value from the sensor.
Setpoint: This is the desired value of the control variable. With our static pressure example, this would be the Static Air Pressure Setpoint.
Delta (Δ): The is the difference between the control variable and the setpoint. This value can be positive or negative and is often represented with the Greek letter delta: Δ
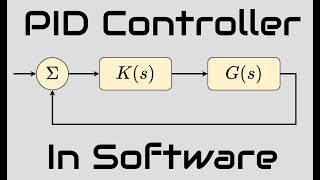
Output: This is the result yielded by the mathematical operations performed on all property values of the PID Loop (property values like input, setpoint, output, feedback -if applicable)
---------------------------------------------------------------------------------------------------------------------
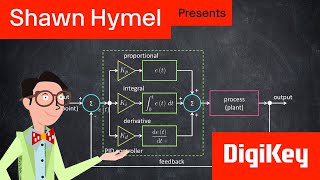
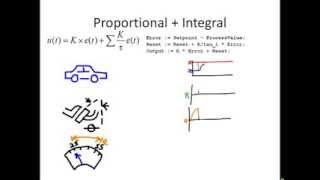
The Letter "P" in PID (Control) Loop stands for Proportion, sometimes called the Gain or Proportional Band and is normally an integer or numeric value.
The Output of the PID Loop is determined here:
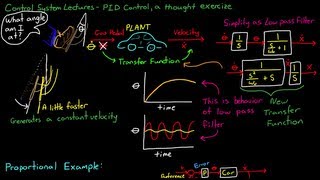
P Loop:
Δ * P value = Output
This will yield a constant output- not changing unless the P or Δ values change.
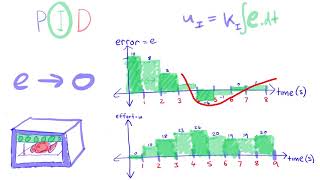
The Letter "I" in PID Loop stands for integral, which is usually an amount of time.
The integral value is over how much time the PID Loop will "reassess" or "re-evaluate" the Δ.
If Δ = 5
P = 3
Then the Output = 15 (%)
After an interval of the Integral Value (let's set our integral to 30 seconds)
Then,
If Δ = 5
P = 3
Then the Output = 15 (%)
After 30 seconds, (1 integral interval)
and Δ = 5 and P = 3 (unchanged from last output calculation)
Then the new output is 30%.
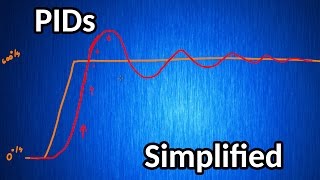
This provides a change-over-time approach which will better control the input to approach the setpoint. This is ccalled a "PI Loop."
The Letter "D" in PID Loop stands for derivative, which is the instantaneous slope and is usually used as an attenuator, or dampener of a PID Control Loop.
Normally, the D value isn't used in HVAC controls, but if an instance of a PID loop requires a faster response time, we can use Derivative to eliminate the "dead time" or the amount of time it took for the control variable to be within an acceptable tolerance of the setpoint.
Want the math?
Check this link out!
https://www.controleng.com/articles/understanding-pid-control-and-loop-tuning-fundamentals/
Training is available by our Certified Technical Trainers at https://www.cochranetechservices.com/...
If you're interested in discussing options and learning more about our training department you can also call us at: 248-591-3560
Comment




![[EN] kOS - The Basics #28 - What Is a PID Loop?](https://ytimg.googleusercontent.com/vi/qZ5Tn5J4ks4/mqdefault.jpg)