How to Use PID Controller Tuner App in MATLAB
Video Not Working? Fix It Now
#controltheory #controlengineering #mechatronics #matlab #sfunction #dynamicalsystems #control #aleksandarhaber #mechanics #engineering #mechanicalengineering
It takes a significant amount of time and energy to create these free video tutorials. You can support my efforts in this way:
- Buy me a Coffee: https://www.buymeacoffee.com/AleksandarHaber
- PayPal: https://www.paypal.me/AleksandarHaber
- Patreon: https://www.patreon.com/user?u=32080176&fan_landing=true
- You Can also press the Thanks YouTube Dollar button
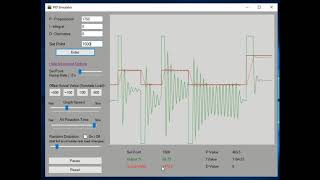
- In this tutorial, we explain how to use the PID Tuner application in MATLAB.
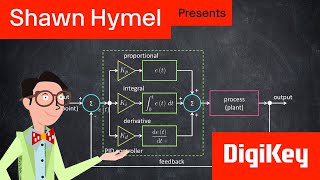
- The PID Tuner application automatically tunes the gains of a Proportional Integral Derivative (PID) Controller for a Single Input Single Output (SISO) plant.
- Tuning can be performed on the basis of desired closed-loop behavior that can be specified in the time or frequency domains.
- You can also select PID controllers with filtered derivative terms or two degrees of freedom PID controllers.
- Two degrees of freedom PID controllers offer more flexibility to balance a trade-off between disturbance rejection and reference tracking.
- WARNING: People often underestimate the complexity of PID controller tuning or in general, they think that it is unnecessary to study control engineering methods beyond the classical PID control methods.
- PID Tuner app as well as MATLAB assumes that models are linear and that there are no nonlinear elements. In reality, most of systems are nonlinear. Furthermore, MATLAB simulations do not take into account noise, disturbances, quantization, implementation issues, model uncertainties, etc. Furthermore, the PID Tuner does not take into account the physical limitations of actuators or other actuator nonlinear effects. Consequently, it might happen that your PID controller behaves perfectly in MATLAB simulations. However, when applied to a real system its performance might be poor, or the closed-loop system might become unstable. That is the main reason why people do PhD in control engineering and control theory or spend decades researching, implementing, and perfecting the knowledge of control engineering methods.
dynamics
control
mechanics
fluid mechanics
Aleksandar Haber
Physics tutorial
Dynamics tutorials
engineering mechanics tutorial
GNC tutorials
mechanical engineering tutorials
AP Physics tutorial
AP Calculus tutorial
control engineering tutorials
mechatronics tutorials
free body fall tutorial
Fluid mechanics tutorials
Fluid dynamics tutorials
Simulink Tutorials
Control Engineering Tutorial
MATLAB S functions
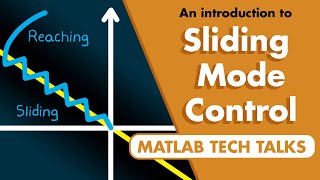
sliding mode control
sliding mode control in MATLAB
Comment