Practical Intro to ROS and URDF #1
Video Not Working? Fix It Now
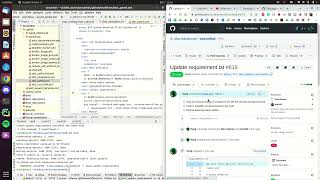
In this is hands on demonstration of ROS and URDF I show you what it takes to simulate a robot in Gazebo. You should have Ubuntu and ROS installed on your computer to follow along.
You can follow this tutorial for setting up VM (Virtual Machine) and installing Ubuntu and ROS: https://youtu.be/ehtUb55Rmmg
Code used in this tutorial: https://github.com/utra-robosoccer/Tutorials-2020
00:00 Intro
0:37 Goal For Today
1:40 What is ROS?
4:40 ROS Advantages & Disadvantages
8:36 ROS basics: Nodes, topics and messages
11:42 URDF and Xacro
15:11 Bez in simulation
17:46 GitHub Repo
22:15 Clone Build Launch Project
31:20 control robot through command line
37:14 deep dive into code
1:06:41 c++ node demo
1:32:30 excercise for the viewer
Comment